
ENDORO RESULTS
Etapa I – Definirea specificatiilor sistemului
Activitatea I: Definirea specificatiilor tehnico-medicale ale sistemului ENDORO
Obiectivul acestei etape a fost acela de a defini în detaliu specificațiile sistemului și procedurile proiectului ENDORO, cerințele tehnice ale acestuia și dezvoltarea scenariilor de testare și a metodologiei de evaluare. Aceasta a presupus două subactivități:
1.1. Definirea procedurilor și specificațiilor sistemului ENDORO: Au fost identificate principalele specificații ale sistemului pentru îndeplinirea funcțiilor sale principale: planificarea procedurii, înregistrarea imaginilor și navigarea instrumentelor, care vor fi testate în proiect și s-au stabilit cerințele tehnice pentru implementarea acestora.
1.2. Definirea cerințele clinice principale ale sistemului ENDORO: dimensiunile cateterului, viteza de inserție, plasarea robotului în sala de chirurgie și dimensiunile generale au fost definite de medicii din consorțiu. Pe baza cerințelor clinice, au fost definite și cerințele tehnice ale motoarelor electrice, mecanisme, design optim pentru carcasă și montare etc.
1.3. Definirea scenariilor de testare și a metodologiei de evaluare pentru a valida robotul și instrumentul SAR nou dezvoltat și a conexiunilor cu software-ul IMAGINE. S-au stabilit specificațiile acțiunilor și testelor care vor fi efectuate pentru prototipuri, s-a stabilit coordonarea echipelor.
Etapa II: Realizarea Sistemului robotic
Activitatea II: Proiectarea si executia prototipului final al sistemului ENDORO
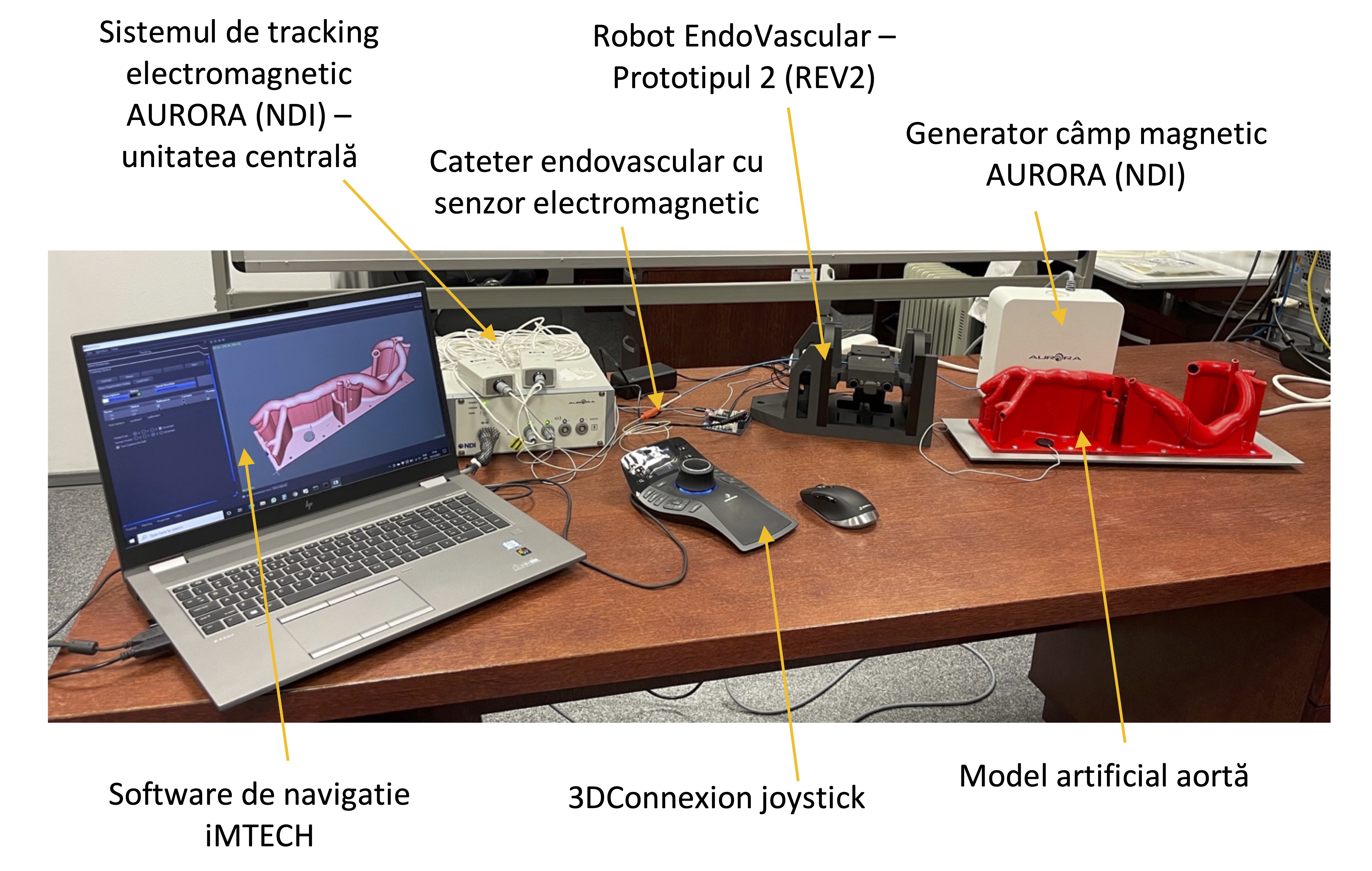
În cadrul activității au fost proiectate, realizate și testate preliminar două variante de roboți pentru proceduri endovasculare REV1 și REV2. Componentele ambelor variante au fost dintr-un polimer special ranforsat cu microfibre de carbon, pe o imprimanta 3D Markforged Onyx Pro existent în cadrul Laboratorului de Microtehnologii și Inginerie Medicală a institutului INCESA al Universității din Craiova. Acționarea se face utilizând motoare Robotis Dynamixel și plăci de comandă Open CM9.04 și Open CM 485. Controlul robotului se face prin intermediul unui mouse 3D și a unui program realizat în Python. Pentru navigație/vizualizarea poziției instantanee a cateterului, roboții folosesc sistemul de tracking electromagnetic AURORA și software-ul iMTECH. Acesta aliniază modelul 3D realizat prin rendering utilizând secțiunilor tomografice ale aortei cu modelul fizic al aortei și prezintă poziția vârfului cateterului de ablație suprapusă peste modelul 3D.

Executia componentelor pentru REV1 (3D Printing Markforged Onyx PRO)

Bancul pentru primele teste ale robotului endovascular REV1
REV2 – prototipul 2 al robotului endovascular si bancul pentru testare
Activitatea III: Proiectarea si executia modelelor artificiale pentru testele de laborator
Obiectivul acestei etape a fost acela de a realiza modele artificiale pentru testarea sistemului robotic. Folosind secțiunile seriate ale tomografiei unui pacient s-a realizat segmentarea și apoi designul 3D al aortei, de la zona abdominală și până la carja aortică. Acest model 3D a fost divizat în 3 segmente datorită lungimii și apoi a fost printat 3D pe o imprimantă Stratasys Fortus FDM 400, din nylon. Cele 3 segmente au fost ulterior fixate pe o placă, iar modelul artificial a scanat tomografic pentru utilizarea sa în teste. Pentru utilizarea sistemului în bronhoscopie, s-a realizat un model 3D al arborelui bronhial din plastic transparent, urmând aceeași procedură: segmentarea căilor aeriene utilizând tomografia unui pacient, urmate de modelarea 3D utilizănd un software CAD și printarea 3D pe o imprimanta ce utilizează ca și suport, ceara, pentru a permite îndepărtarea din canale. În final și acest model a fost scanat tomografic pentru a fi utilizat în teste.
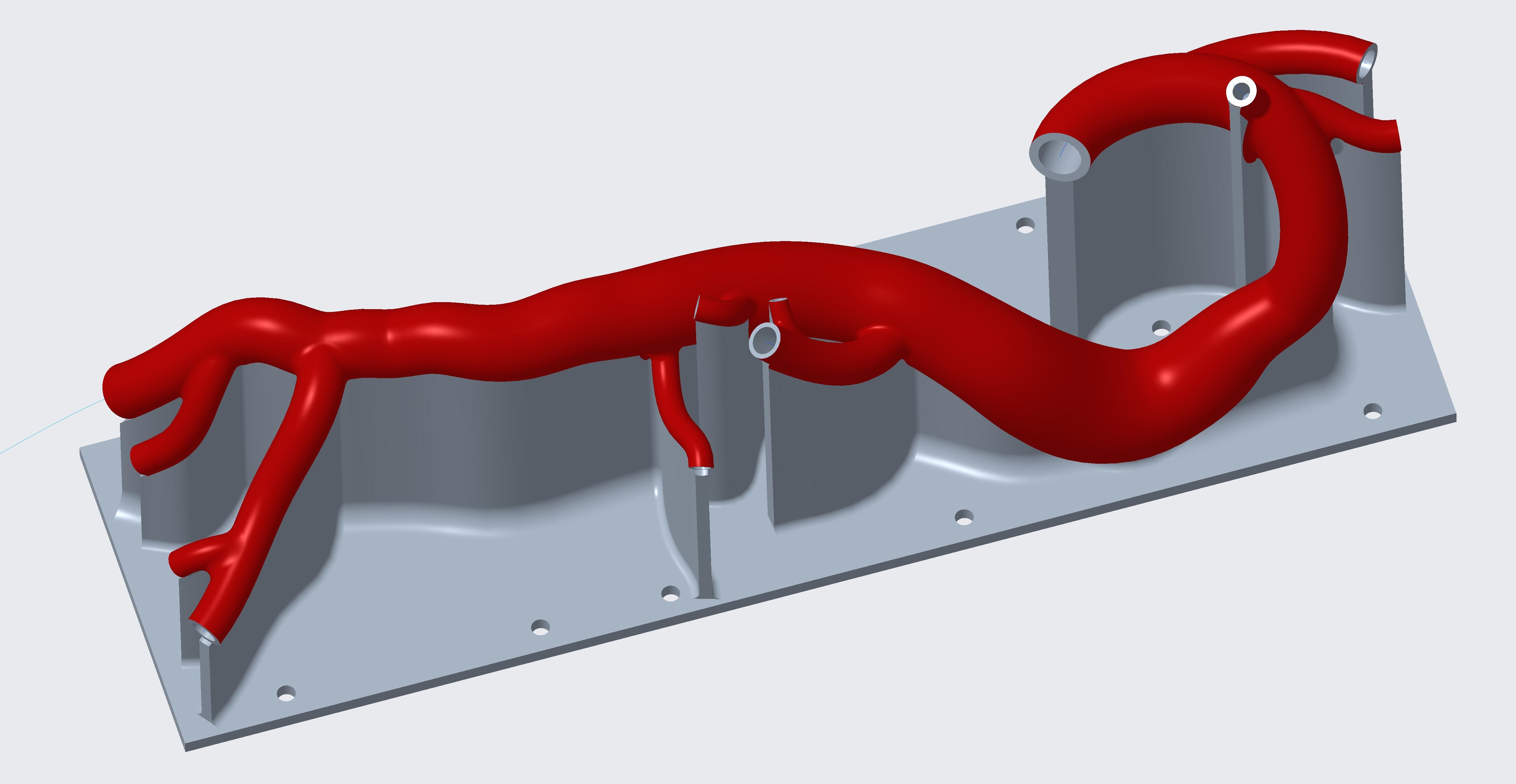
Proiectul CAD al aortei pentru modelul artificial pentru testarea robotului
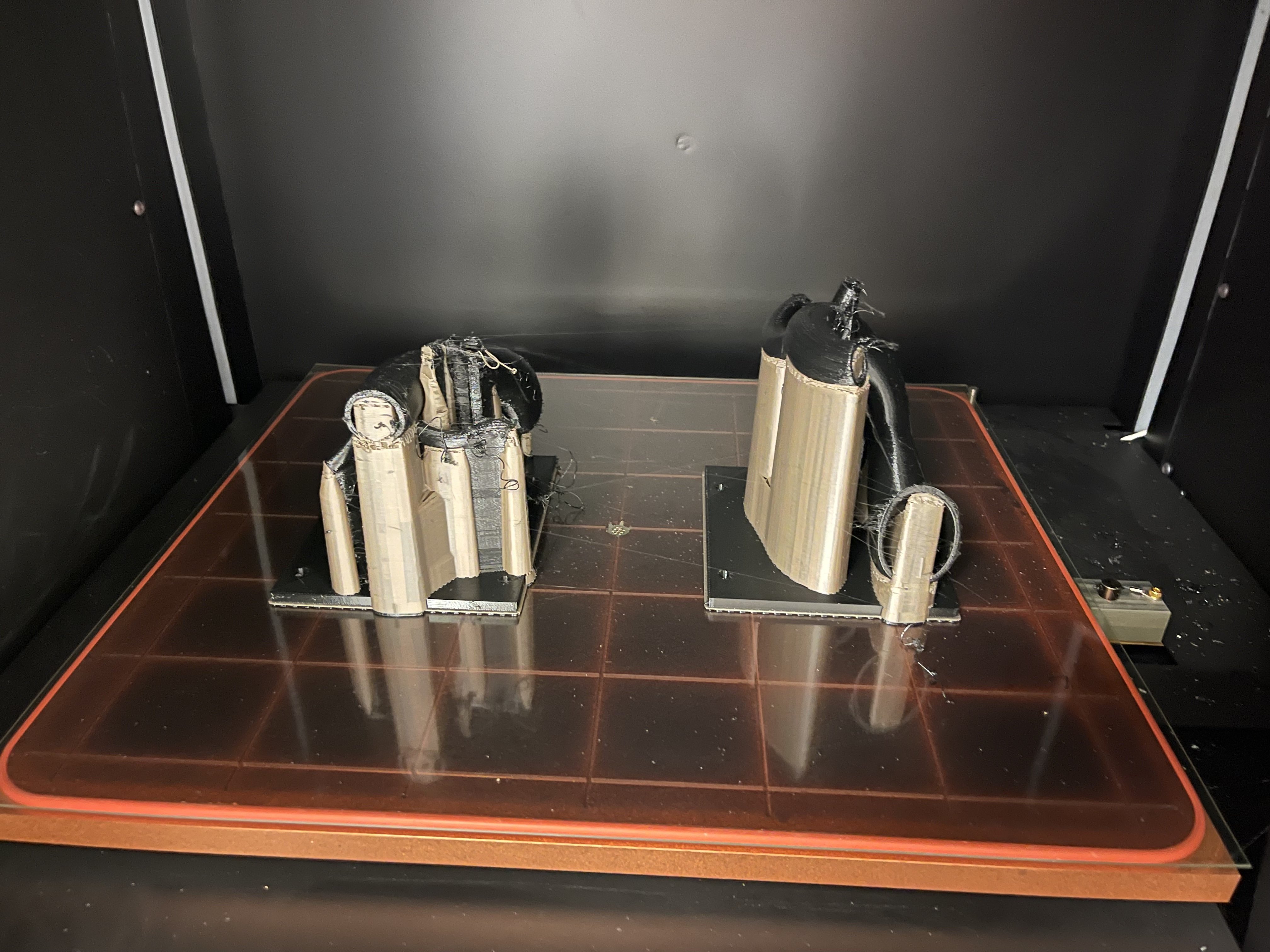
Realizarea aortei prin 3D printing pe o imprimanta Stratasys Fortus FDM 400 din nylon

Modelul printat 3D al aortei care va fi folosit pentru teste

Modelul transparent al cailor aeriene realizat prin 3D printing
Activitatea IV: Activitati suport de diseminare, protejare a drepturilor intelectuale si participare la conferinte
– a fost depusă la OSIM cererea pentru brevet de invenție numărul A100711/25.11.2021, cu titlul “Robot pentru procedure endovasculare”.
– un articol științific cu denumirea “Feasability of the cardiac ablation procedures using robotics and electromagnetic tracking” este in lucru pentru publicare la jurnalul ISI Q2 “Applied Sciences”.
– un articol științific cu denumirea „A Novel Peripheral Intravenous Catheter for Easier Vein Access and Faster Resuscitation in Critically Ill Patients” a fost trimis pentru publicare la jurnalul ISI Q2 „Diagnostics”.